あぁ・・・
なんかここ2・3日の日記のタイトルがちょっと違う気がs
変えてこよう('ω')
直してみたけどスッキリしなかった。
ま、いっか><w
昨日もせっせと物理演算。
どうしてもお腹のぽっこりが直らないのであとまわs(またかよ><
まずはジョイントの制限角度でふんわり具合確認。
縦繋がりは↑な感じで放置なので
横繋がりのみ統一。
上限下限±はSSの数値でテスト~( ゚Д゚)ノ
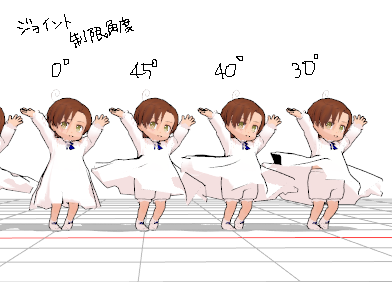
え?
てっきり数値が低いほど初期位置から動かないと思ったのに、
±30°が一番上がってるとかどゆこと???(;゚ω゚)
やっぱジョイント謎過ぎる・・・
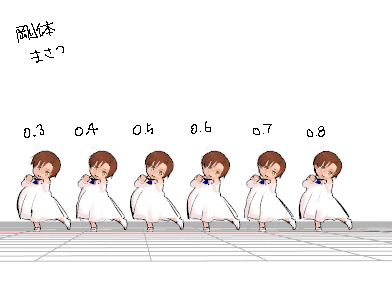
動きのテストってコトでついでに剛体設定。
・質量
振り回した時数値が大きい程大きな動きに。
とりあえずこのままで様子見。
もうちょい小さくした方がいいのかなぁ?
・移動回転減衰
0 → 1
早 遅(1は動かない)
スカートはもっとゆっくり動いて欲しいので
デフォから徐々に大きい数字に。

うん、なんか動きがやわらかくなった気がする♪(´ω`*)
・反発力
剛体と接した時に反発する力
0 →
無 大
この布はそんな必要ないかな?
・摩擦力
剛体と接した時
0 →
無 大
ちょっとやってみた。
最初間違えて数値大きくしてしまいましたが;
0.3とかふんわり度が更に増した気がする♪(´ω`*)
後は質量で調節かな?
次は後回しにしたぽっこり・・・
ジョイント自体がおかしくなってるのかと数値初期化。
初期化ってどうやればいいかなと思ってましたが 0 にすれば良かったのか~><w
PMXだと一括修正可と教えていただき早速・・・(`・ω・´)
おぉー!
ぽっこり直って最初の状態になりました♪(´∀`*)
ありがとうございますv
ここで
直ったし後ろと同じ数値入れてみるか
と入れてみたらぽっこり再びorz
これは何かの呪いですか?:(((´д`;))):
じゃ、じゃあ・・・視点を変えて;;
制限角度の前数値 □-□ の入力順序で違い出ないかなぁ・・・
と淡い期待><
まずどっちにも同じ数字を入れてスカートがどの角度になるか確認。
40・50°くらいだと0よりも大分お腹へっこんでる。
50°も角度はついてないけど。
マイナス値だと0と変化はなし。
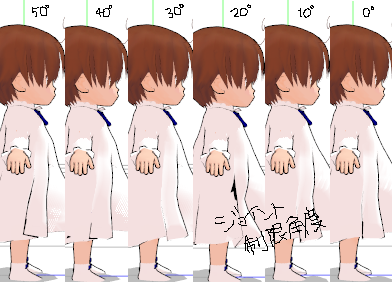
・・・ここで疑問。
どうしてプラス値で下に下がるの?(・ω・)
まま、この位置が動いた時一番体に近くなる位置ってコトですかね?><
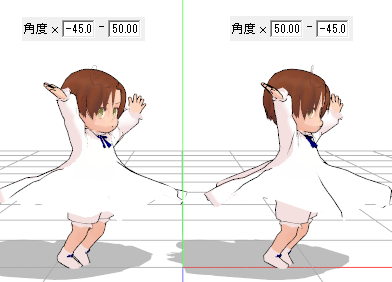
次は □-□ のどっちにどの数値を入れるか?
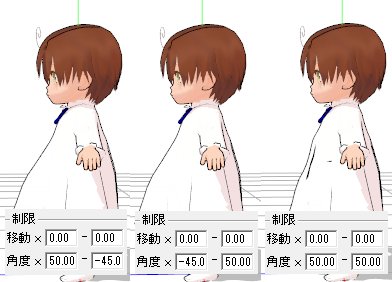
うん、動きの幅なのでどっちに入れても関係ないよね~(´∀`;)
そして基本位置は数値の小さい方でなのかy
もうぽっこり打つ手なしorz
ぽっこりめーっ><

PR